在微观世界中,如何让微米级机器实现复杂的三维运动一直是科学界的难题。传统微机器受限于二维平面运动,难以在复杂微环境中执行多任务操作。
 一、研究亮点
一、研究亮点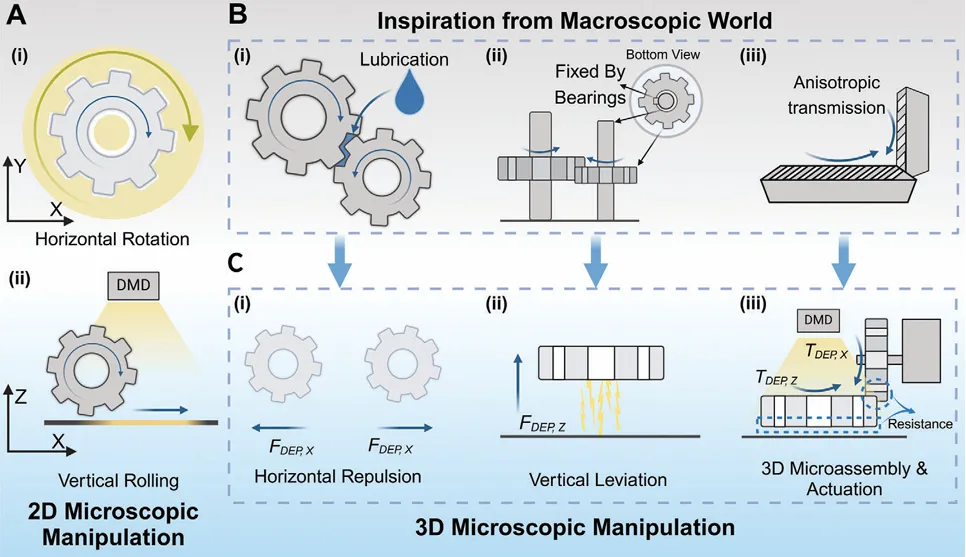
图1. 构建可在三维空间中运行的多组件微机器系统
光电镊(OET)技术革新
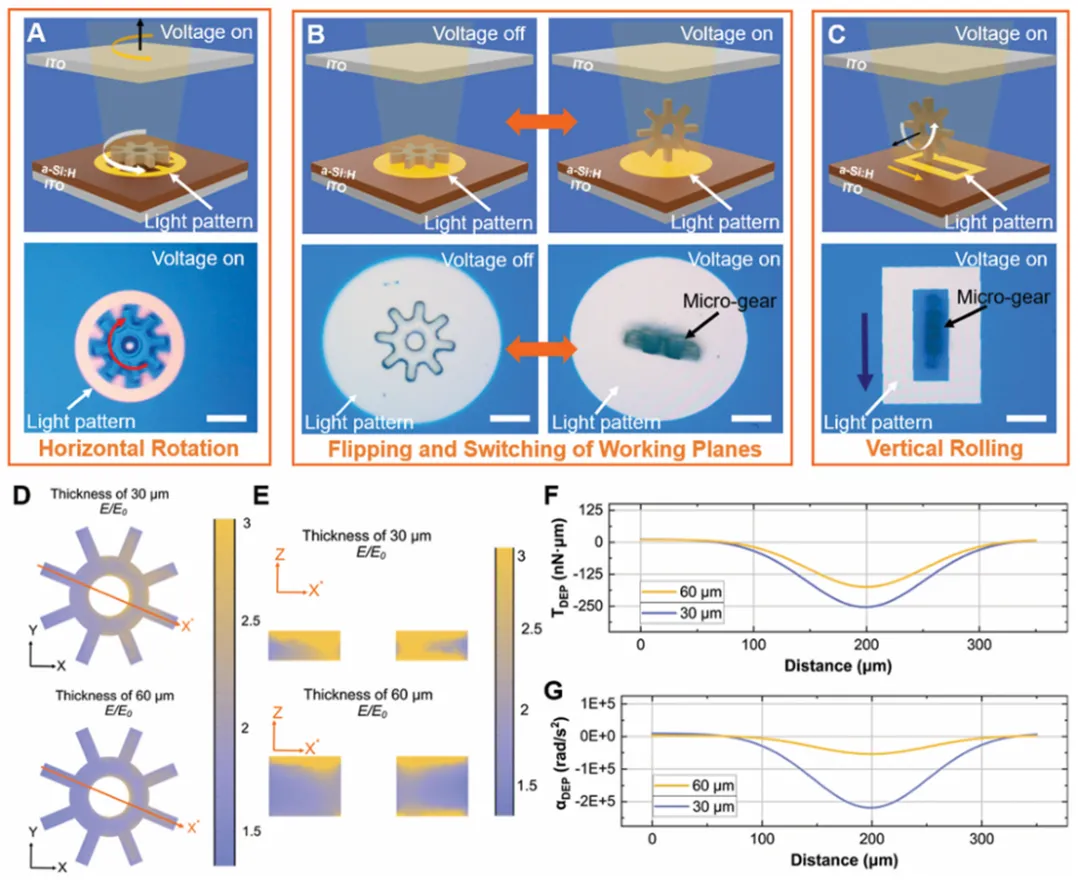
图2. 微齿轮的翻转行为
A) 微齿轮在水平面旋转的示意图及显微镜图像。B) 电压关闭时平躺的微齿轮(左),电压开启后通过圆形光图案推动翻转至直立状态。C) 直立微齿轮被空心矩形光图案推动并在垂直平面滚动。D) 30 μm和60 μm厚微齿轮在XY平面的相对电场分布模拟。E) 30 μm和60 μm厚微齿轮在XZ平面的相对电场分布模拟。F) 不同位置下微齿轮的介电泳翻转扭矩计算结果。G) 不同位置下微齿轮的翻转角加速度计算结果。
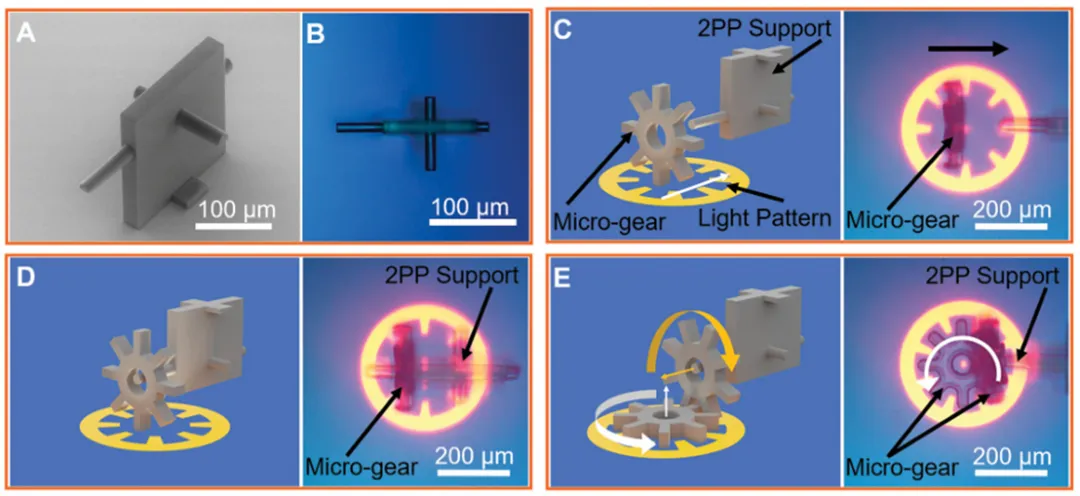
图3. 基于OET的微齿轮系统组装与驱动
A) 2PP制备的机械支撑结构SEM图像。B) 机械支撑的俯视显微镜图像。C) 直立微齿轮与支撑结构的组装过程示意图及实验图像。D) 组装后微齿轮与支撑的互连结构。E) 三维跨平面微齿轮组的运行示意图及实验图像。
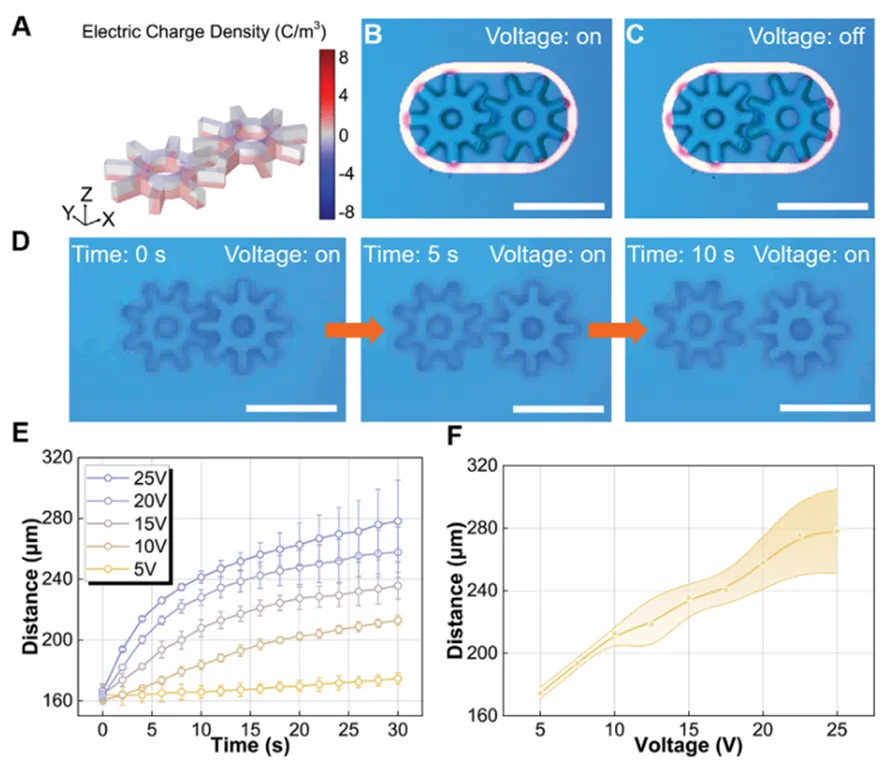
图4. 微齿轮的排斥机制
A) 二维齿轮组表面电荷分布的模拟。B) 光图案促使两齿轮物理啮合的显微镜图像。C) 关闭电压后齿轮运动无明显变化的显微镜图像。D) 关闭光图案后齿轮因电压排斥分离的显微镜图像。E) 不同电压下齿轮间距随时间的变化。F) 不同电压下齿轮最终间距的测量。
仿生设计,灵感来自宏观世界
二、总结与展望
本研究采用了深圳追光生物科技有限公司自主研发的OptoBot®500光电镊微流控操控平台(https://www.optoseeker.com/)。作为国内首款实现商业化的全自动光电镊系统,该平台在技术可靠性和操作便捷性方面具有显著优势,并已经在清华大学、中国科技大学、北京理工大学、南方科技大学等中国顶尖高校得以使用。
 图5. OptoBot® 500光电镊系统及其产生的微颗粒图案
图5. OptoBot® 500光电镊系统及其产生的微颗粒图案文章信息(*为通讯作者):
Gong Li, Bingrui Xu, Xiaopu Wang, Jiangfan Yu, Yifan Zhang, Rongxin Fu, Fan Yang, Hongcheng Gu, Yuchen Huang, Yujie Chen, Yanfeng Zhang, Zhuoran Wang, Guozhen Shen, Yeliang Wang, Huikai Xie, Aaron R. Wheeler, Jiafang Li*, Shuailong Zhang*, “Crossing the Dimensional Divide with Optoelectronic Tweezers: Multicomponent Light-Driven Micromachines with Motion Transfer in Three Dimensions”, Advanced Materials, 2025, 37, 2417742.
论文链接:
论文原文 https://advanced.onlinelibrary.wiley.com/doi/abs/10.1002/adma.202417742
附作者简介:
李恭,北京理工大学集成电路与电子学院博士生,研究方向为光电镊技术、光驱动微机械系统、光电镊控制算法等,目前已发表包括Advanced Materials、Microsystems & Nanoengineering、Nano Letters在内的多篇高水平论文。
张帅龙,北京理工大学集成电路与电子学院教授、博士生导师(谢会开教授团队),十四五国家重点研发计划项目首席专家(2次),2019年度中组部海外高层次青年人才,2024年度重庆市杰出青年基金获得者,集成声光电微纳系统教育部工程研究中心副主任,北京理工大学九三学社委员会副主委,三支社主委。主要从事生物微纳操作技术、光电镊技术、微流控技术、生物芯片与传感技术、微全分析系统、科学仪器创制研究。
课题组网站:https://www.x-mol.com/groups/zhangshuailong
李家方,北京理工大学物理学院特聘教授、博士生导师,国家杰出青年科学基金获得者,国家青年拔尖人才,基金委“极端光场制造科学与工程”基础科学中心项目核心成员,北京理工大学光电学院党委书记。主要从事表面等离激元及光子晶体结构中光和物质的相互作用研究,并致力于发展纳米剪纸、飞秒激光直写等三维微纳加工技术与应用。



 粤公网安备44030002004557号
粤公网安备44030002004557号